时间:2021-11-07 来源:数字化企业网
前言
纯电驱动的电动汽车因为集成有大容量电池组,可以存储取自公共电网的电能,用来驱动车辆的行驶。相比于传统的混合动力汽车,具有更加优越的节能减排效果和潜力。因此,近年来,纯电驱动电动汽车的技术开发与产业化备受瞩目。纯电驱动的电动汽车类型主要包括有:纯电动汽车、插电式混合动力汽车和增程型电动汽车。2012年,国务院发布的《节能与新能源汽车产业发展规划(2012-2020年)》中明确提出:以纯电驱动为新能源汽车发展和汽车工业转型的主要战略取向,当前重点推进纯电动汽车和插电式混合动力汽车产业化。
相比于内燃机,驱动电机具有体积小/功率密度高等特点,同时驱动电机的布置位置与方式也非常灵活。因此,纯电驱动电动汽车的电驱动系统拥有多种可能的组合方式,称之为动力总成拓扑结构。以纯电动汽车为例,常见的动力总成拓扑结构包括有:中央驱动式动力总成、轮边驱动式动力总成和轮毂直驱式动力总成等,如图1所示。本文即以上述三种典型的动力总成拓扑结构为研究对象。
轮毂电机驱动方式用于微型纯电动汽车,主要研究了拓扑结构的构型和参数设计。多轮驱动转矩协同控制解决了车辆防滑工况时的纵向驱动转矩和加速度降低等问题。但是,不同的动力总成拓扑结构对电动汽车的能量经济性、制造/使用成本、车辆性能等方面的影响与分析的研究相对较少。本文拟根据多学科优化设计方法(Multidisciplinary Design Optimization method,简称 MDO),对于中央驱动式、轮边驱动式和轮毂直驱式这三种动力总成拓扑结构进行全面、综合的分析与比较,重点研究不同的动力总成拓扑结构类型对于车辆性能、能耗、成本等方面影响。
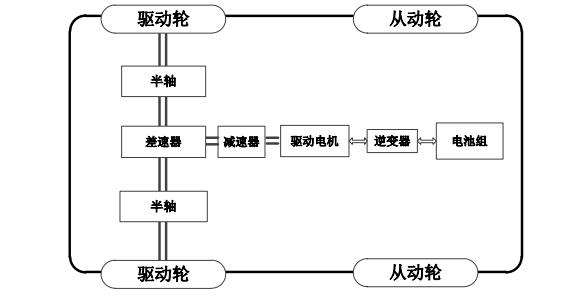
(a) 中央驱动式动力总成
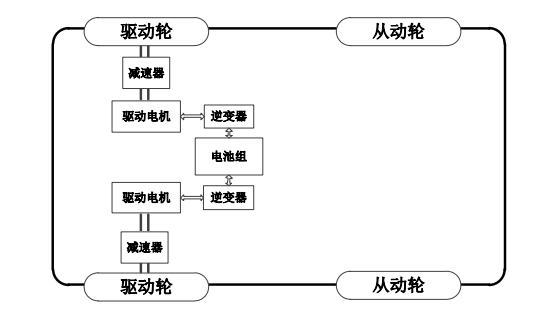
(b)轮边驱动式动力总成
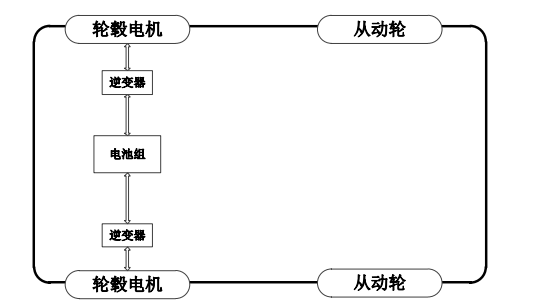
(c)轮毂直驱式动力总成
图1 纯电驱动电动汽车典型的动力总成拓扑结构
1 基于目标分解的多学科优化方案
1.1 MDO优化架构选型
MDO方法是处理复杂系统设计与工程问题的重要手段之一。近年来,在航空航天、交通运输、海洋船舶等领域有着广泛的应用。MDO方法的主旨是:综合多个学科各自优势进行分析与优化,同时,在各个学科之间建立有效地协同机制,通过不断的调节与平衡,使得系统的总体性能达到/实现既定设计要求或系统最优解。
目前,常用的 MDO 方法主要包括有:协同优化(Collaborative Optimization,简称CO)、并行子空间优化 ( Concurrent Subspace Optimization,简称CSSO)、二级系统一体化合成优化(
-Level Integrated System Synthesis,简称BLISS)等。其中,1999年由美国密西根大学优化设计实验室首先提出的解析目标分解法(Analytical Target Cascading,简称ATC),基于系统/部件分级思路,根据系统复杂程度不同,自上而下地将整个系统分解为系统层级、子系统层级和部件层级等。ATC方法的分级级数原则上可以不受限制。ATC方法特别适合于解决类似汽车优化设计问题,即整车/系统由众多子系统和部件组合而成,且子系统/部件之间存在着相互耦合关系。在ATC架构的每一个层级中,都包含有优化模型 P与分析模型r。其中,优化模型P通过调用分析模型r获得设计响应。
1.2 ATC优化架构设计
鉴于纯电驱动电动汽车的动力总成大都由驱动电机、减速器、传动轴、驱动轮等部件组成,因此本文选用ATC优化架构处理中央驱动式、轮边驱动式和轮毂直驱式这三种动力总成的优化设计问题。本文建立了2层的ATC优化设计架构。其中,系统层级主要用来处理纯电驱动电动汽车的性能、能耗及动力总成的总成本。而对于动力总成中最为关键的部件-驱动电机,则在子系统/部件层级中予以优化。图1所示的是本文所建立的ATC优化架构的层级示意图。
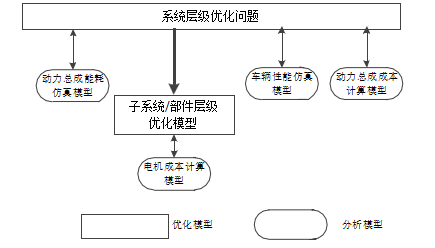
图2 基于ATC方法的动力总成优化架构
2 系统层级优化问题
根据上述ATC架构的划分, 本文使用SIGHT软件进行优化架构设计。其中,在系统层级中,主要分析与优化车辆的动力性能、能量经济性与整个动力总成的制造成本等。因此,对于系统层级中的优化模型和分析模型作如下处理。
2.1 优化模型
在系统层级中,选用遗传算法( genetic algorithm,简称GA)作为优化模型中的优化算法。这主要是因为在系统层级的
模型中,复杂度高、非线性强、且不连续。因此,基于启发式的进化算法更易于寻找到全局最优解/解集。而遗传算法是启发式进化算法中应用范围较广、适用性较好的一种优化算法。
将系统层级优化设计问题表述为:在满足给定的车辆动力性能前提下,使得车辆的使用成本(即耗电成本)与动力总成的制造总成本最小
化,如公式(1)所示:
式中:x为设计变量组合,包括电机转子直径 d、转子长度L和传动比ig等,f(x)为车辆行驶一年所需要支付的使用成本(即耗电成本)。车辆平均每天的行驶里程为53
,以每年365天记,则全年大约行驶2万公里。因为,纯电驱动的电动汽车电能取自电网,故电能价格按0.51RMB/kWh记。costpt(x)为动力总成制造总成本,包括有电池组成本、电机本体、电机控制器及传动系统等成本。其中,要求电池组在充满电的情况下,可以支持车辆行驶80km距离。g1-g6为车辆需要满足的动力性能要求,如表1所示。这些性能要求来源于2012年颁布实施的中国国家标准GB/T 28382-2012《纯电动乘用车-技术要求》。
表1 整车性能指标

2.2 分析模型
在系统层级中,基于遗传算法的优化模型需要通过调用分析模型,分别得到车辆的动力性能指标、车辆使用成本和动力总成的制造成本。因此,本文基于上述三个方面的述求,分别建立了与之相关的一系列仿真模型。
对于车辆动力性能仿真模型,本课题基于表1中所设定的6项车辆动力性能要求,分别建立了相对应的车辆动力性能仿真模型。选用MATLAB/Simulink 软件作为建模工具,采用基于前向仿真的建模方法,使得整个仿真模型更加趋向真实情况。在所搭建的仿真模型中,分别包括有驾驶员模型、整车控制模型、驱动电机模型、传动系模型、车辆动力学模型及电池组模型。其中选用 Nissan Leaf 进行了模型的验证与能量流分析。
为了计算电动汽车的使用成本,本文根据国家标准GB/T 18386-2005《电动汽车能量消耗率和续驶里程试验方法》,建立了基于NEDC驾驶循环工况整车能耗计算仿真模型。类似于车辆动力性能仿真模型,在其所拥有的模块的基础上,在增加了驾驶循环模型和能耗计算功能。本文电动汽车充电效率记为80% 。
对于各种不同的动力总成拓扑结构而言,其传动系(包括减速器和半轴等)基本组成部件相对固定,通过市场调研确定为固定值。驱动电机的计算成本主要由子系统层级完成并上传至系统层级。而对于电池包的制造成本,以 3000元/kWh记。电池包一次充满电,需要支持车辆行驶80km距离。因此,对于能耗越低的动力总成拓扑结构而言,除车辆的使用成本会较低外,其电池组部分的制造成本也会相对较小。
3 子系统/部件层级优化问题
在子系统/部件层级,主要处理驱动电机的优化设计,使其即满足车辆驱动性能的要求,又使得其制造成本最小化。
3.1 优化模型
在子系统/部件层级中,不同于系统层级需要处理复杂的仿真模型。因此,选用了序列二次规划(Sequential Quadratic Programming,简称SQP)算法作为优化算法。SQP优化算法对于连续可导的数值型优化求解问题,具有快速寻优的能力。
对于子系统/部件层级,一方面需要使得这一层级的优化设计变量-电机的转子直径d和转子长度L趋近于由系统层传递下来的转子直径
dU
和长度
LU
,这是为了满足系统层级所设定的车辆动力性能和能耗最小化等要求。另一方面,通过电机的转子直径d和转子长度L的优化组合,使得电机的制造成本最小化。
因此,子系统/部件层级的优化设计问题可以表述为如公式(2)所示:
式中:电机转子直径d、转子长度L为本地设计变量,costmotor为电机制造成本。
3.2 分析模型
对于子系统/部件层级,分析模型的主要作用是计算在满足既定性能要求情况下的最小制造成本。本文基于Willans line方法,开发了参数化的电机仿真模型。Willans line方法原先用来描述发动机的有效平均压力与燃油消耗之间的关系。这种方法被进行了移植,用来描述电机特性。即以一种驱动电机作为标杆,通过结构上的变化,可以使用Willans line方法估算出新结构下驱动电机的效率特性和性能。
而对于电机成本的计算,则随着电机尺寸大小的变化而不同。电机设计中,电机的转子外径和长度、气隙、定子厚度、磁钢密度、铜线密度、线圈轧数等。先根据这些参数计算出定子、转子、线圈及轴的质量。再根据价格,计算得到相应的成本。
4 不同动力总成拓扑结构的对比分析
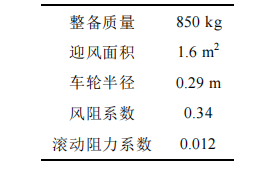
表2给出了整车的基本参数。纯电驱动电动汽车三种不同的动力总成拓扑结构都是基于相同的整车参数的基础上进行优化设计与对比分析。
表2 整车参数汇总
4.1 制造成本的对比与分析
图3所示的是三种动力总成拓扑结构的制造成本对比情况。由于机械结构的简化,使得轮毂直驱式动力总成拓扑结构的传动系制造成本最低。而机械结构最为复杂中央驱动式拓扑结构的传动系成本最高。
而从整体制造成本的对比中,可以发现轮毂直驱式电机的制造成本最高,而中央驱动式成本最低。这说明,相比于中央驱动式拓扑结构而言,轮毂直驱式拓扑结构虽然较少了诸如减速器、传动轴等机械部件,但是由于驱动电机数量、性能等方面的提升,导致驱动电机部分的成本有大幅上升。
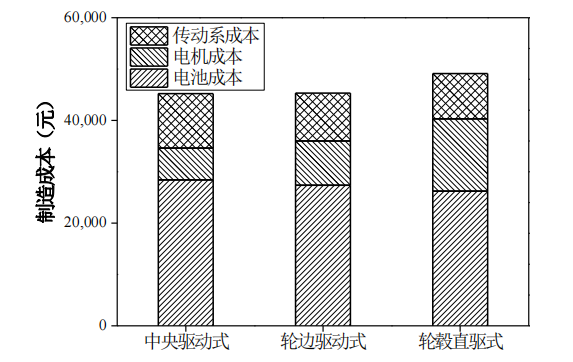
图3 三种拓扑结构的制造成本对比
需要特别说明的是:轮边驱动式和轮毂直驱式的电机制造成本都是由2台电机构成,而中央驱动式则为一台。这主要是取决于动力总成的结构,本文的研究基于图1所示的三种典型动力总成拓扑结构。
4.2 使用成本/能耗的对比与分析
图4所示的是三种动力总成拓扑结构能耗成本/使用成本对比。
从中可以发现:由于减少了传动系的机械损失,使得轮毂直驱式动力总成拓扑结构拥有最好的能量效率,因而其在行驶相同距离的情况下,所消耗的电能最少。这一点,在图3中也可以体现出来,因为能耗少,因而所需要装载的电池组就相对较少,电池组的制造成本也就较低。
但是,从能耗水平来说,三种拓扑结构相差不大。这一方面是由于中央驱动式动力总成拓扑结构中的机械传动系本身的传动效率就比较高。另一方面是因为中央驱动式的电机拥有比轮毂直驱式更加优越的工作环境,如良好的冷却条件,振动较低等,使得其可以长时间的范围内拥有比较高的工作效率。
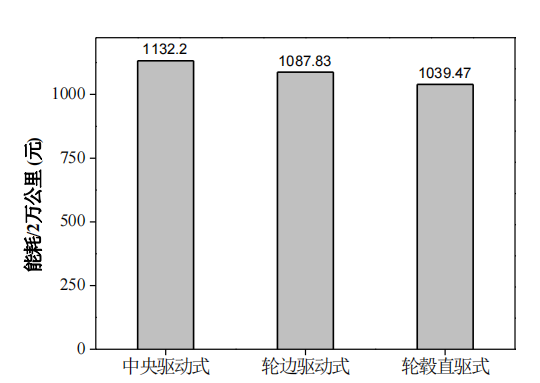
图4 三种拓扑结构的使用成本对比
4.3 驱动电机特性的对比与分析
表3所示的是三种动力总成拓扑结构驱动电机优化设计后的对比。
表3 驱动电机优化设计结果的对比
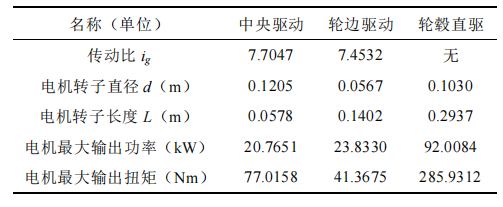
因为没有减速器实施减速增扭的作用,轮毂直驱式动力总成的驱动电机最大输出转矩最大。而如果考虑到轮边驱动式和轮毂直驱式都采用了双驱动电机结构,它们的功率储备比中央驱动式都要大。这也是导致图3中驱动电机的制造成本差异的原因所在。
5 结论
本文针对纯电驱动的电动汽车动力总成进行了优化设计,并对不同拓扑结构进行了比较与分析,主要结论如下所述:
(1)本文基于多学科优化的解析目标分解方法,构建了2层的优化架构,综合考虑电动汽车动力总成的能耗、动力性能与其制造成本。
(2)轮边驱动式和轮毂直驱式动力总成拓扑结构在制造成本上要高于中央驱动式拓扑结构,其中主要原因是由于驱动电机成本的增加。
(3)由于简化了传动系,使得轮毂直驱式动力总成拓扑结构的能量效率最高,因此其使用成本和电池组的制造成本也最低。但是,其驱动电机的性能要求则因为没有减速器而大幅增加。
来源:数字化企业网
点赞人: 齐琪